所长
庞岩
副所长
谭述君
研究方向:飞行器动力学与控制
包括:
1 航天器动力学与控制
复杂卫星在轨动力学参数辨识
大型液体火箭“姿控-结构-推进”大回路耦合系统
大型索网天线形面精度分析与控制
空间太阳能电站在轨动力学特性分析与控制
2 复杂控制系统建模与非线性控制
混杂系统建模与控制方法
非线性广义最小方差控制理论与方法
3 高精度保结构数值算法研究
精细积分方法
保辛摄动方法
科研成果
1 建立了大型液体火箭“姿控-推进-结构”大回路耦合系统模型及软件,探讨了大回路耦合机理及重要参数对大回路稳定性的影响,复现了C2F火箭飞行中的POGO现象,为新型火箭的研制提供了参考。
*首次指出增加阻尼比有可能提高、也有可能降低耦合系统的稳定性,分析了传统临近阻尼比法的适用性问题。
*提出了复杂液路推进系统的纯微分方程模型及其自动化建模方法,可直接应用于POGO回路及大回路的稳定性分析和仿真。
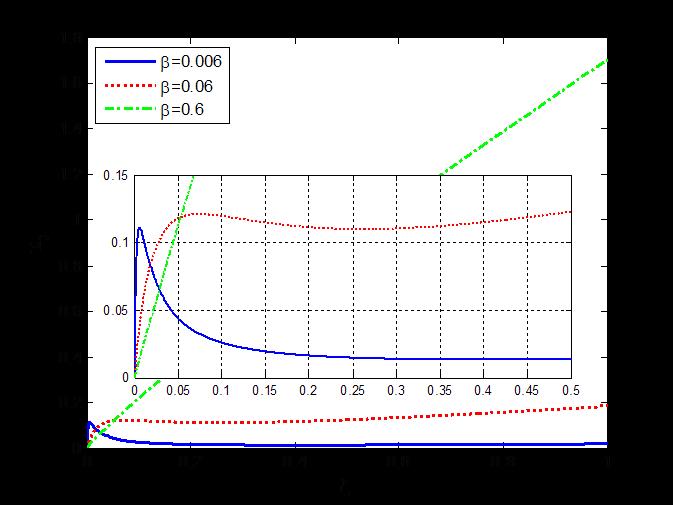
临界阻尼比图 和 大回路仿真图
2 航天器编队飞行队形重构的时变控制器设计。
以双星编队重构为例对航天器编队的远/近程逼近的最优控制方法展开了研究,基于自主研发的PIMCSD Toolbox设计了时变控制器,并且在航天器飞行控制仿真平台上通过了验证,研究了时变控制器对航天器编队控制精度、燃料消耗的影响,以及在不显著降低系统性能指标的情况下对时变控制器的简化。
仿真结果(如图2.1和表2.1所示)表明:相对于传统的定常控制器方案,新的时变控制器方案可以在更短的控制时间内,以更少的燃料消耗,达到更高的终端控制精度;同时所设计的简化形式的时变控制器不仅具有良好的性能指标,也便于工程设计和实现。为航天器编队控制系统的工程设计和实现提供了重要的参考。
2.1 定常控制器和时变控制器控制结果比较
控制方案 |
控制 时间 |
时间 节省 |
燃料 消耗 |
燃料 节省 |
控制精度 (x,y<1 ) |
定常控制器 |
1 |
/ |
1 |
/ |
(0.496, 0.017) |
时变控制器1 |
0.587 |
41.3% |
0.722 |
27.8% |
(0.374, 0.590) |
3 混杂系统建模与优化控制
应用实时系统理论,离散系统理论 ,线性规划,动态规划, 博弈论等方法发展了混杂系统控制器分析方面新理论。此理论已被应用于(1)机场飞机交通控制。 其结果是使得飞机既避免了碰撞并能安全到达机场跑道,又能使损耗(能源消耗)降到最低。(2)自由活塞式发动机控制。由于活塞运动自由(没有连接装置限制)因此不容易达到稳定,这样就给活塞运动控制带来很大困难。为解决这一困难,通过用混杂系统来建模和控制,并用Simulink 进行仿真, 取得很好的结果,使得系统模型简化,控制结果优化。
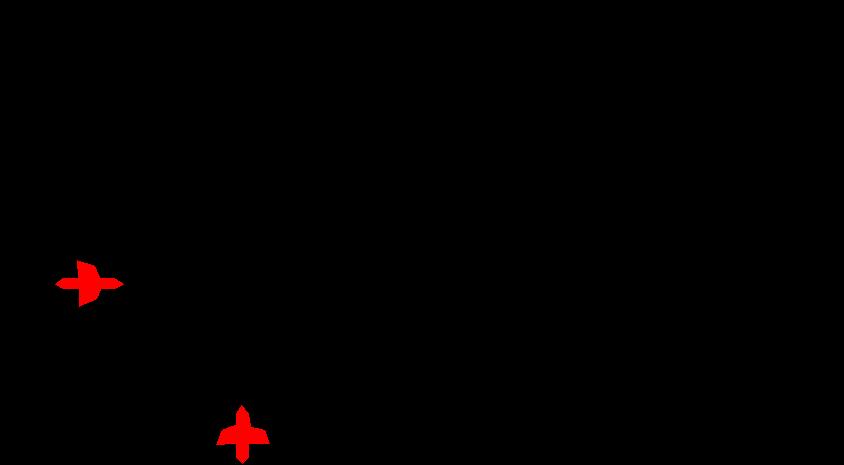
图飞机交通控制
4多变量系统的非线性控制
传统的控制与辨识理论主要是基于线性系统的,多变量非线性控制仍是当前研究的热点和难点。课题组在非线性控制理论的主要贡献有:非线性广义的最小方差(NGMV)方法对于依赖状态的多变量系统的控制 以及非线性广义的最小方差控制器对于混杂系统的控制。除了以上理论创新还建立了新的计算方法,并设计了控制器.这些理论已被应用于无人机控制,船舶控制,化工控制,汽车牵引力的控制等等,并已被证明能够比传统的非线性控制器得到更好的性能指标。同时还开发了其Matlab工具箱软件包,具有良好的商业价值和市场前景。
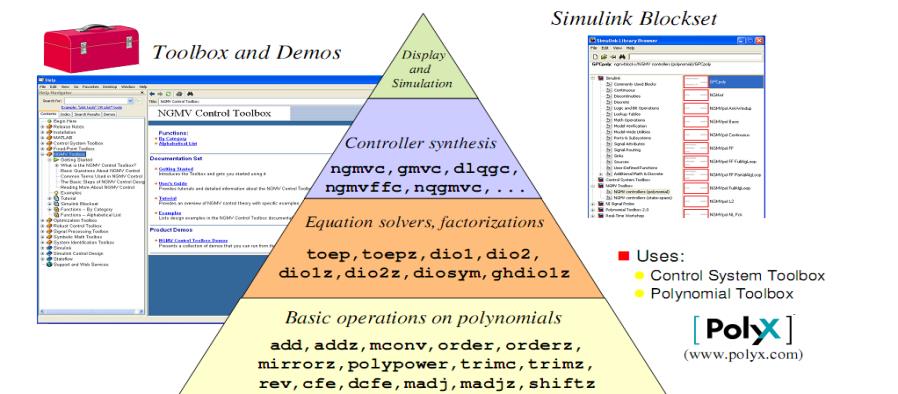
图 NGMV 控制工具箱
5 大型索网天线结构分析的参变量变分原理及有限元方法
大型索网天线结构分析是进行找形分析和形面精度调整的基础,而索单元拉压模量不同引起的本构非线性和大变形引起的几何非线性是分析的难点。对此,我们结合参变量变分原理和非线性有限元方法,将问题转化为非线性平衡方程和互补方程的求解,提高了分析精度和收敛性,并开发了相应软件。
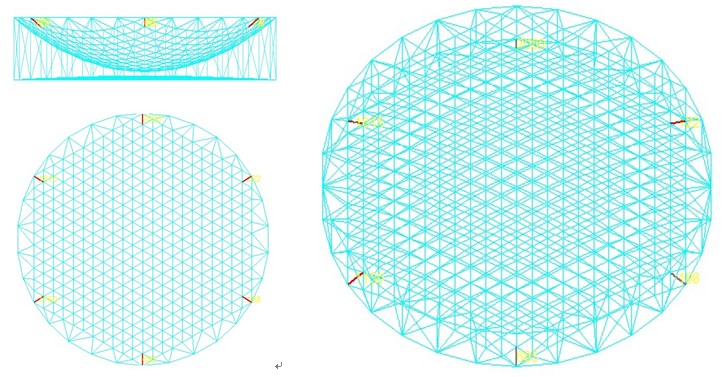
图 大型索网天线失效单元
6 提出了处理初值、边值问题非齐次项的扩展精细积分方法。该方法避免了系统矩阵的求逆运算,而且当非齐次项为多项式函数、指数函数、正/余弦函数及其组合函数的形式时,可以得到计算机精度的数值解。并推广应用于:非线性微分方程数值算法的构造,无限长时间及变系数两点边值问题的求解,周期时变Floquet 、Riccati、Lyapunov、Sylvester 等矩阵微分方程的求解,以及含矩阵指数函数积分的计算等问题的研究。
